转载自《对抗训练浅谈:意义、方法和思考(附Keras实现)》 和《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》,作者:苏剑林。
提高模型的泛化性能是机器学习致力追求的目标之一。常见的提高泛化性的方法主要有两种:
- 第一种是添加噪声,比如往输入添加高斯噪声、中间层增加 Dropout 以及对抗训练等,对图像进行随机平移缩放等数据扩增手段某种意义上也属于此列;
- 第二种是往 loss 里边添加正则项,比如 $L_1, L_2$ 惩罚、梯度惩罚等。
本文试图探索几种常见的提高泛化性能的手段的关联。
添加随机噪声
我们记模型为 $f(x)$,$\mathcal{D}$ 为训练数据集合,$l(f(x), y)$ 为单个样本的 loss,那么我们的优化目标是
\[\mathop{\arg\min}_{\theta} L(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}}[l(f(x), y)] \tag{1}\]$\theta$ 是 $f(x)$ 里边的可训练参数。假如往模型输入添加噪声 $\varepsilon$,其分布为 $q(\varepsilon)$,那么优化目标就变为
\[\mathop{\arg\min}_{\theta} L_{\varepsilon}(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}, \varepsilon\sim q(\varepsilon)}[l(f(x + \varepsilon), y)] \tag{2}\]当然,可以添加噪声的地方不仅仅是输入,也可以是中间层,也可以是权重 $\theta$,甚至可以是输出 $y$(等价于标签平滑),噪声也不一定是加上去的,比如 Dropout 是乘上去的。对于加性噪声来说,$q(\varepsilon)$ 的常见选择是均值为 0、方差固定的高斯分布;而对于乘性噪声来说,常见选择是均匀分布 $U([0,1])$ 或者是伯努利分布。
添加随机噪声的目的很直观,就是希望模型能学会抵御一些随机扰动,从而降低对输入或者参数的敏感性,而降低了这种敏感性,通常意味着所得到的模型不再那么依赖训练集,所以有助于提高模型泛化性能。
提高效率
添加随机噪声的方式容易实现,而且在不少情况下确实也很有效,但它有一个明显的缺点:不够“特异性”。噪声 $\varepsilon$ 是随机的,而不是针对 $x$ 构建的,这意味着多数情况下 $x + \varepsilon$ 可能只是一个平凡样本,也就是没有对原模型造成比较明显的扰动,所以对泛化性能的提高帮助有限。
从理论上来看,加入随机噪声后,单个样本的 loss 变为
\[\tilde{l}(x,y)=\mathbb{E}_{\varepsilon\sim q(\varepsilon)}[l(f(x+\varepsilon),y)]=\int q(\varepsilon) l(f(x+\varepsilon),y) d\varepsilon\label{eq:noisy-loss} \tag{3}\]但实践上,对于每个特定的样本 $(x,y)$,我们一般只采样一个噪声,所以并没有很好地近似上式。当然,我们可以采样多个噪声 $\varepsilon_1,\varepsilon_2,\cdots,\varepsilon_k\sim q(\varepsilon)$,然后更好地近似
\[\tilde{l}(x,y)\approx \frac{1}{k}\sum_{i=1}^k l(f(x+\varepsilon_i),y) \tag{4}\]但这样相当于 batch size 扩大为原来的 $k$ 倍,增大了计算成本,并不是那么友好。
一个直接的想法是,如果能事先把式 $(3)$ 中的积分算出来,那就用不着低效率地采样了(或者相当于一次性采样无限多的噪声)。我们就往这个方向走一下试试。当然,精确的显式积分基本上是做不到的,我们可以做一下近似展开:
\[l(f(x+\varepsilon),y)\approx l(f(x),y)+(\varepsilon \cdot \nabla_x) l(f(x),y)+\frac{1}{2}(\varepsilon \cdot \nabla_x)^2 l(f(x),y) \tag{5}\]然后两端乘以 $q(\varepsilon)$ 积分,这里假设 $\varepsilon$ 的各个分量是独立同分布的,并且均值为 0、方差为 $\sigma^2$,那么积分结果就是
\[\int q(\varepsilon)l(f(x+\varepsilon),y)d\varepsilon \approx l(f(x),y)+\frac{1}{2}\sigma^2 \Delta l(f(x),y) \tag{6}\]这里的 $\Delta$ 是拉普拉斯算子,即 $\Delta f = \sum\limits_i \frac{\partial^2}{\partial x_i^2} f$。这个结果在形式上很简单,就是相当于往 loss 里边加入正则项 $\frac{1}{2}\sigma^2 \Delta l(f(x),y)$,然而实践上却相当困难,因为这意味着要算 $l$ 的二阶导数,再加上梯度下降,那么就一共要算三阶导数,这是现有深度学习框架难以实现的。
转移目标
直接化简 $l(f(x+\varepsilon),y)$ 的积分是行不通了,但我们还可以试试将优化目标换成
\[l(f(x+\varepsilon),f(x)) + l(f(x),y)\label{eq:loss-2} \tag{7}\]也就是变成同时缩小 $f(x),y$、$f(x+\varepsilon),f(x)$ 的差距,两者双管齐下,一定程度上也能达到缩小 $f(x+\varepsilon),y$ 差距的目标。
用数学的话来讲,如果 $l$ 是某种形式的距离度量,那么根据三角不等式就有
\[l(f(x+\varepsilon),y) \leq l(f(x+\varepsilon),f(x)) + l(f(x),y)\]如果 $l$ 不是度量,那么通常根据詹森不等式也能得到一个类似的结果,比如 $l(f(x+\varepsilon),y)=\Vert f(x+\varepsilon) - y\Vert^2$,那么我们有
\[\begin{aligned} \Vert f(x+\varepsilon) - f(x) + f(x) - y\Vert^2 =& \left\Vert \frac{1}{2}\times 2[f(x+\varepsilon) - f(x)] + \frac{1}{2}\times 2[f(x) - y]\right\Vert^2\\ \leq& \frac{1}{2} \Vert 2[f(x+\varepsilon) - f(x)]\Vert^2 + \frac{1}{2} \Vert 2[f(x) - y]\Vert^2\\ =& 2\big(\Vert f(x+\varepsilon) - f(x)\Vert^2 + \Vert f(x) - y\Vert^2\big) \end{aligned}\]这也就是说,目标 $(7)$(的若干倍)可以认为是 $l(f(x+\varepsilon),y)$ 的上界,原始目标不大好优化,所以我们改为优化它的上界。
注意到,目标 $(7)$ 的两项之中,$l(f(x+\varepsilon),f(x))$ 衡量了模型本身的平滑程度,跟标签没关系,用无标签数据也可以对它进行优化,这意味着它可以跟带标签的数据一起,构成一个半监督学习流程。
对于目标 $(7)$ 来说,它的积分结果是:
\[\begin{aligned} \int q(\varepsilon) \big[l(f(x+\varepsilon),f(x)) + l(f(x),y)\big]d\varepsilon & = l(f(x),y) + \int q(\varepsilon) l(f(x+\varepsilon),f(x)) d\varepsilon\\ & \approx l(f(x),y) + \frac{1}{2}\sigma^2 \sum_i \lambda_i(x)\Vert \nabla_x f_i(x)\Vert^2 \end{aligned} \tag{8}\]这其实就是对每个 $f(x)$ 的每个分量都算一个梯度惩罚项 $\Vert \nabla_x f_i(x)\Vert^2$,然后按 $\lambda_i(x)$ 加权求和。
对于 MSE 来说,$l(f(x),y)=\Vert f(x) - y\Vert^2$,这时候可以算得 $\lambda_i(x)\equiv 2$,所以对应的正则项为 $\sum\limits_i\Vert \nabla_x f_i(x)\Vert^2$;对于 KL 散度来说,$l(f(x),y)=\sum\limits_i y_i \log \frac{y_i}{f_i(x)}$,这时候 $\frac{1}{f_i(x)}$,那么对应的正则项为 $\sum\limits_i f_i(x) \Vert \nabla_x \log f_i(x)\Vert^2$。这些结果大家多多少少可以从著名的“花书”《深度学习》中找到类似的,所以并不是什么新的结果。类似的推导还可以参考文献《Training with noise is equivalent to Tikhonov regularization》。
当然,虽然能求出只带有一阶梯度的正则项 $\sum\limits_i \lambda_i(x)\Vert \nabla_x f_i(x)\Vert^2$,但事实上这个计算量也不低,因为需要对每个 $f_i(x)$ 都要求梯度,如果输出的分量数太大,这个计算量依然难以承受。
这时候可以考虑的方案是通过采样近似计算:假设 $q(\eta)$ 是均值为 0、方差为 1 的分布,那么我们有
\[\sum\limits_i \Vert \nabla_x f_i(x)\Vert^2=\mathbb{E}_{\eta_i\sim q(\eta)}\left[\left\Vert\sum_i \eta_i \nabla_x f_i(x)\right\Vert^2\right] \tag{9}\]这样一来,每步我们只需要算 $\sum\limits_i \eta_i f_i(x)$ 的梯度,不需要算多次梯度。$q(\eta)$ 的一个最简单的取法是空间为 $\{-1,1\}$ 的均匀分布,也就是 $\eta_i$ 等概率地从 $\{-1,1\}$ 中选取一个。
对抗训练
前面我们提到,添加随机加噪声可能太没特异性,所以想着先把积分算出来,才有了后面推导的关于近似展开与梯度惩罚的一些结果。换个角度想,如果我们能想办法更特异性地构造噪声信号,那么也能提高训练效率,增强泛化性能。
Min-Max
总的来说,对抗训练可以统一写成如下格式
\[\min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[\max_{\varepsilon\in\Omega}l(f(x+\varepsilon), y)\right]\label{eq:min-max} \tag{10}\]其中 $\mathcal{D}$ 代表训练集,$x$ 代表输入,$y$ 代表标签,$\theta$ 是模型参数,$l(f(x),y)$ 是单个样本的 loss,$\varepsilon$ 是对抗扰动,$\Omega$ 是扰动空间。
这个统一的格式首先由论文《Towards Deep Learning Models Resistant to Adversarial Attacks》提出。
这个式子可以分步理解如下:
- 往属于 $x$ 里边注入扰动 $\varepsilon$,$\varepsilon$ 的目标是让 $l(f(x+\varepsilon), y)$ 越大越好,也就是说尽可能让现有模型的预测出错;
- 当然 $\varepsilon$ 也不是无约束的,它不能太大,否则达不到“看起来几乎一样”的效果,所以 $\varepsilon$ 要满足一定的约束,常规的约束是 $\Vert\varepsilon\Vert\leq \epsilon$,其中 $\epsilon$ 是一个常数;
- 每个样本都构造出对抗样本 $x + \varepsilon$ 之后,用 $(x + \varepsilon, y)$ 作为数据对去最小化 loss 来更新参数 $\theta$(梯度下降);
- 反复交替执行 1、2、3 步。
由此观之,整个优化过程是 $\max$ 和 $\min$ 交替执行,这确实跟 GAN 很相似,不同的是,GAN 所 $\max$ 的自变量也是模型的参数,而这里 $\max$ 的自变量则是输入(的扰动量),也就是说要对每一个输入都定制一步 $\max$。
现在的问题是如何计算 $\varepsilon$,它的目标是增大 $l(f(x+\varepsilon), y)$,而我们知道让 loss 减少的方法是梯度下降,那反过来,让 loss 增大的方法自然就是梯度上升,因此可以简单地取
\[\varepsilon = \epsilon \nabla_x l(f(x), y) \tag{11}\]当然,为了防止 $\varepsilon$ 过大,通常要对 $\nabla_x l(f(x), y)$ 做些标准化,比较常见的方式是
\[\varepsilon = \epsilon \frac{\nabla_x l(f(x), y)}{\Vert \nabla_x l(f(x), y)\Vert}\quad\text{或}\quad \varepsilon = \epsilon \text{sign}(\nabla_x l(f(x), y)) \tag{12}\]有了 $\varepsilon$ 之后,就可以代回式 $(10)$ 进行优化
\[\min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[l(f(x+\varepsilon), y)\right] \tag{13}\]这就构成了一种对抗训练方法,被称为 Fast Gradient Method(FGM),它由 GAN 之父 Goodfellow 在论文《Explaining and Harnessing Adversarial Examples》首先提出。
对抗训练还有一种方法,叫做 Projected Gradient Descent(PGD),其实就是通过多迭代几步来达到让 $l(f(x+\varepsilon),y)$ 更大的 $\varepsilon$。如果迭代过程中模长超过了 $\epsilon$,就缩放回去,细节请参考《Towards Deep Learning Models Resistant to Adversarial Attacks》。
对于 CV 领域的任务,上述对抗训练的流程可以顺利执行下来,因为图像可以视为普通的连续实数向量,$\varepsilon$ 也是一个实数向量,因此 $x + \varepsilon$ 依然可以是有意义的图像。但 NLP 不一样,NLP 的输入是文本,它本质上是 one hot 向量,而两个不同的 one hot 向量,其欧氏距离恒为 $\sqrt{2}$,因此对于理论上不存在什么“小扰动”。
一个自然的想法是像论文《Adversarial Training Methods for Semi-Supervised Text Classification》一样,将扰动加到 Embedding 层。这个思路在操作上没有问题,但问题是,扰动后的 Embedding 向量不一定能匹配上原来的 Embedding 向量表,这样一来对 Embedding 层的扰动就无法对应上真实的文本输入,这就不是真正意义上的对抗样本了,因为对抗样本依然能对应一个合理的原始输入。
那么,在 Embedding 层做对抗扰动还有没有意义呢?有!实验结果显示,在很多任务中,在 Embedding 层进行对抗扰动能有效提高模型的性能。
实验结果
对于 CV 任务来说,一般输入张量的 shape 是 $(b,h,w,c)$,这时候我们需要固定模型的 batch size(即 $b$),然后给原始输入加上一个 shape 同样为 $(b,h,w,c)$、全零初始化的 Variable,比如就叫做 $\varepsilon$,那么我们可以直接求 loss 对 $x$ 的梯度,然后根据梯度给 $\varepsilon$ 赋值,来实现对输入的干扰,完成干扰之后再执行常规的梯度下降。
对于 NLP 任务来说,原则上也要对 Embedding 层的输出进行同样的操作,Embedding 层的输出 shape 为 $(b,n,d)$,所以也要在 Embedding 层的输出加上一个 shape 为 $(b,n,d)$ 的 Variable,然后进行上述步骤。但这样一来,我们需要拆解、重构模型,对使用者不够友好。
不过,我们可以退而求其次。Embedding 层的输出是直接取自于 Embedding 参数矩阵的,因此我们可以直接对 Embedding 参数矩阵进行扰动。这样得到的对抗样本的多样性会少一些(因为不同样本的同一个 token 共用了相同的扰动),但仍然能起到正则化的作用,而且这样实现起来容易得多。
基于上述思路,这里给出 Keras 下基于 FGM 方式对 Embedding 层进行对抗训练的参考实现:
核心代码如下:
def adversarial_training(model, embedding_name, epsilon=1):
"""给模型添加对抗训练
其中model是需要添加对抗训练的keras模型,embedding_name
则是model里边Embedding层的名字。要在模型compile之后使用。
"""
if model.train_function is None: # 如果还没有训练函数
model._make_train_function() # 手动make
old_train_function = model.train_function # 备份旧的训练函数
# 查找Embedding层
for output in model.outputs:
embedding_layer = search_layer(output, embedding_name)
if embedding_layer is not None:
break
if embedding_layer is None:
raise Exception('Embedding layer not found')
# 求Embedding梯度
embeddings = embedding_layer.embeddings # Embedding矩阵
gradients = K.gradients(model.total_loss, [embeddings]) # Embedding梯度
gradients = K.zeros_like(embeddings) + gradients[0] # 转为dense tensor
# 封装为函数
inputs = (model._feed_inputs +
model._feed_targets +
model._feed_sample_weights) # 所有输入层
embedding_gradients = K.function(
inputs=inputs,
outputs=[gradients],
name='embedding_gradients',
) # 封装为函数
def train_function(inputs): # 重新定义训练函数
grads = embedding_gradients(inputs)[0] # Embedding梯度
delta = epsilon * grads / (np.sqrt((grads**2).sum()) + 1e-8) # 计算扰动
K.set_value(embeddings, K.eval(embeddings) + delta) # 注入扰动
outputs = old_train_function(inputs) # 梯度下降
K.set_value(embeddings, K.eval(embeddings) - delta) # 删除扰动
return outputs
model.train_function = train_function # 覆盖原训练函数
定义好上述函数后,给 Keras 模型增加对抗训练就只需要一行代码了:
# 写好函数后,启用对抗训练只需要一行代码
adversarial_training(model, 'Embedding-Token', 0.5)
需要指出的是,由于每一步算对抗扰动也需要计算梯度,因此每一步训练一共算了两次梯度,因此每步的训练时间会翻倍。
为了测试实际效果,我们选了中文 CLUE 榜的两个分类任务:IFLYTEK 和 TNEWS,模型选择了中文 BERT base。在 CLUE 榜单上,BERT base 模型在这两个数据上的成绩分别是 60.29% 和 56.58%,经过对抗训练后,成绩为 62.46%、57.66%,分别提升了 2% 和 1%!
\[\begin{array}{c|cc} \hline & \text{IFLYTEK} & \text{TNEWS} \\ \hline \text{无对抗训练} & 60.29\% & 56.58\% \\ \text{加对抗训练} & 62.46\% & 57.66\% \\ \hline \end{array}\]训练脚本请参考:task_iflytek_adversarial_training.py。
当然,同所有正则化手段一样,对抗训练也不能保证每一个任务都能有提升,但从目前大多数“战果”来看,它是一种非常值得尝试的技术手段。
BERT 的 finetune 本身就是一个非常玄学的过程,论文《Fine-Tuning Pretrained Language Models: Weight Initializations, Data Orders, and Early Stopping》换用不同的随机种子跑了数百次 finetune 实验,发现最好的结果能高出好几个点,所以如果你跑了一次发现没提升,不妨多跑几次再下结论。
延伸思考
假设已经得到对抗扰动 $\varepsilon$,那么我们在更新 $\theta$ 时,考虑对 $l(f(x+\varepsilon), y)$ 的展开:
\[\begin{aligned}&\min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[l(f(x+\varepsilon), y)\right]\\ \approx&\, \min_{\theta}\mathbb{E}_{(x,y)\sim\mathcal{D}}\left[l(f(x), y)+\langle\nabla_x l(f(x), y), \varepsilon\rangle\right] \end{aligned} \tag{14}\]对应的 $\theta$ 的梯度为
\[\begin{equation}\nabla_{\theta}l(f(x), y)+\langle\nabla_{\theta}\nabla_x l(f(x), y), \varepsilon\rangle\end{equation}\]代入 $\varepsilon=\epsilon \nabla_x l(f(x), y)$,得到
\[\begin{aligned}&\nabla_{\theta}l(f(x), y)+\epsilon\langle\nabla_{\theta}\nabla_x l(f(x), y), \nabla_x l(f(x), y)\rangle\\ =&\,\nabla_{\theta}\left(l(f(x), y)+\frac{1}{2}\epsilon\left\Vert\nabla_x l(f(x), y)\right\Vert^2\right) \end{aligned} \tag{15}\]这个结果表示,对输入样本施加 $\epsilon \nabla_x l(f(x), y)$ 的对抗扰动,一定程度上等价于往 loss 里边加入“梯度惩罚”
\[\frac{1}{2}\epsilon\left\Vert\nabla_x l(f(x), y)\right\Vert^2\label{eq:gp}\tag{16}\]如果对抗扰动是 $\epsilon \nabla_x l(f(x), y)/\Vert \nabla_x l(f(x), y)\Vert$,那么对应的梯度惩罚项则是 $\epsilon\left\Vert\nabla_x l(f(x), y)\right\Vert$。
这又跟前一节的关于噪声积分的结果类似,表明梯度惩罚应该是通用的能提高模型性能的手段之一。
梯度惩罚
几何图像
事实上,关于梯度惩罚,我们有一个非常直观的几何图像。以常规的分类问题为例,假设有 $n$ 个类别,那么模型相当于挖了 $n$ 个坑,然后让同类的样本放到同一个坑里边去:
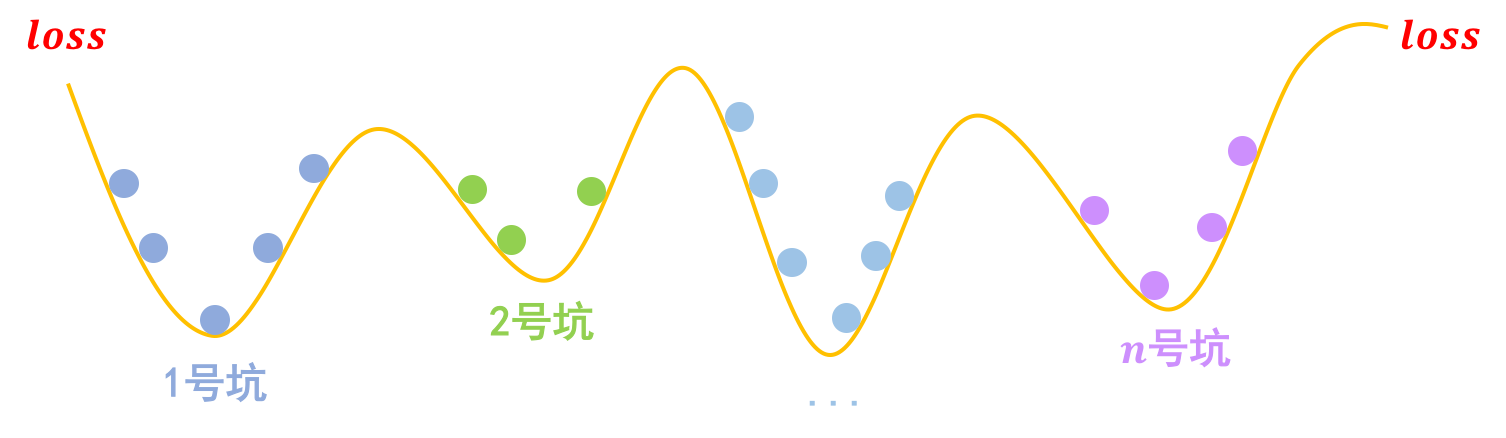
梯度惩罚则说“同类样本不仅要放在同一个坑内,还要放在坑底”,这就要求每个坑的内部要长这样:
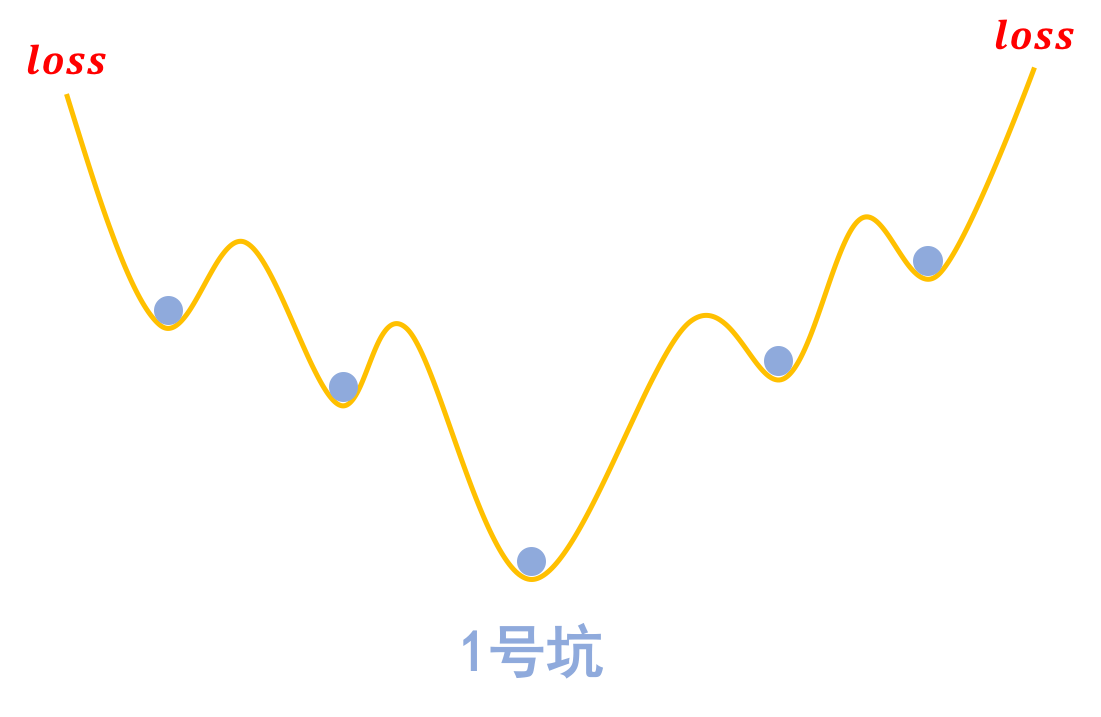
为什么要在坑底呢?因为物理学告诉我们,坑底最稳定呀,所以就越不容易受干扰呀,这不就是对抗训练的目的么?
那坑底意味着什么呢?极小值点呀,导数(梯度)为零呀,所以不就是希望 $\Vert\nabla_x l(f(x),y)\Vert$ 越小越好么?这便是梯度惩罚 $(16)$ 的几何意义了。
代码实现
相比前面的 FGM 式对抗训练,其实梯度惩罚实现起来还容易一些,因为它就是在 loss 里边多加一项罢了,而且实现方式是通用的,不用区分 CV 还是 NLP。
Keras 参考实现如下:
def sparse_categorical_crossentropy(y_true, y_pred):
"""自定义稀疏交叉熵
这主要是因为keras自带的sparse_categorical_crossentropy不支持求二阶梯度。
"""
y_true = K.reshape(y_true, K.shape(y_pred)[:-1])
y_true = K.cast(y_true, 'int32')
y_true = K.one_hot(y_true, K.shape(y_pred)[-1])
return K.categorical_crossentropy(y_true, y_pred)
def loss_with_gradient_penalty(y_true, y_pred, epsilon=1):
"""带梯度惩罚的loss
"""
loss = K.mean(sparse_categorical_crossentropy(y_true, y_pred))
embeddings = search_layer(y_pred, 'Embedding-Token').embeddings
gp = K.sum(K.gradients(loss, [embeddings])[0].values**2)
return loss + 0.5 * epsilon * gp
model.compile(
loss=loss_with_gradient_penalty,
optimizer=Adam(2e-5),
metrics=['sparse_categorical_accuracy'],
)
可以看到,定义带梯度惩罚的 loss 非常简单,就两行代码而已。需要指出的是,梯度惩罚意味着参数更新的时候需要算二阶导数,但是 Tensorflow 和 Keras 自带的 loss 函数不一定支持算二阶导数,比如 K.categorical_crossentropy 支持而 K.sparse_categorical_crossentropy 不支持,遇到这种情况时,需要自定重新定义 loss。
效果比较
还是前面两个任务,结果如下表。可以看到,梯度惩罚能取得跟 FGM 基本一致的结果。
\[\begin{array}{c|cc} \hline & \text{IFLYTEK} & \text{TNEWS} \\ \hline \text{无对抗训练} & 60.29\% & 56.58\% \\ \text{加对抗训练} & 62.46\% & 57.66\% \\ \text{加梯度惩罚} & 62.31\% & 57.81\% \\ \hline \end{array}\]完整的代码请参考:task_iflytek_gradient_penalty.py。
转载自《对抗训练浅谈:意义、方法和思考(附Keras实现)》 和《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》,作者:苏剑林。